GPM
调度模型
前置基础知识¶
协程的来源¶
线程分为 用户态线程 和 内核态线程。
CPU 能感知的只有 内核态线程,它负责内核态线程的创建、初始化、切换、销毁等任务; 而我们的任务是放在用户态线程去执行的,我们负责用户态线程的创建、初始化、切换、销毁等; 所以用户态线程必须和内核态线程必须绑定起来,使得CPU可以操作用户态线程。
另外,用户态线程的创建、初始化、切换、销毁等工作由
调度器去做,用户(程序员)并不需要亲自动手。
既然用户态线程和内核态线程需要绑定起来,那也就有不同的绑定方式。一共有三种:
- 1 : 1(一对一)其实跟多线程多进程无异,切换的成本昂贵。
- 1 : N(一对多)无法利用多个 CPU,且如果一个用户态线程阻塞了,后面的用户态线程也执行不了。
- M : N(多对多)能够利用多核,但是过于依赖调度器的优化和算法。
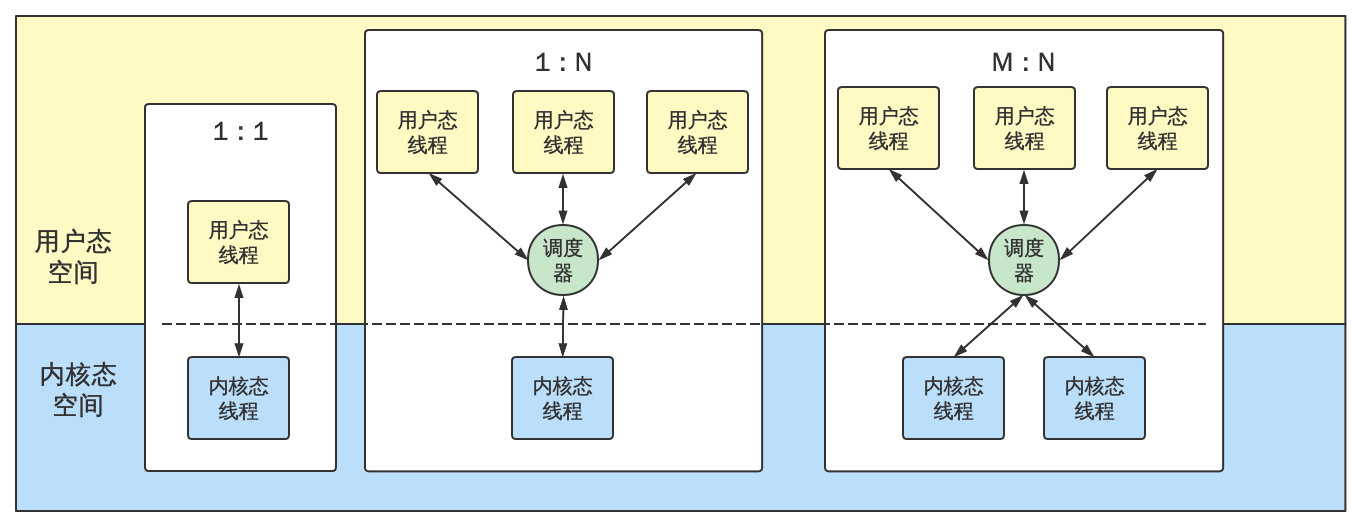
Golang 中的并发方案,采用的是多对多。早期 Golang 的调度器其实性能很差,直到后来经过优化以后有了质的飞跃,也成了 Golang 的一张名片。
经过优化以后,Golang 的调度器对 Goroutine 进行优化,一个 Goroutine 的占用仅几 KB,可以随意大量开辟。而现在采用的 GPM 模型,调度灵活,切换成本低。
GPM 线程调度模型¶
GPM 模型¶
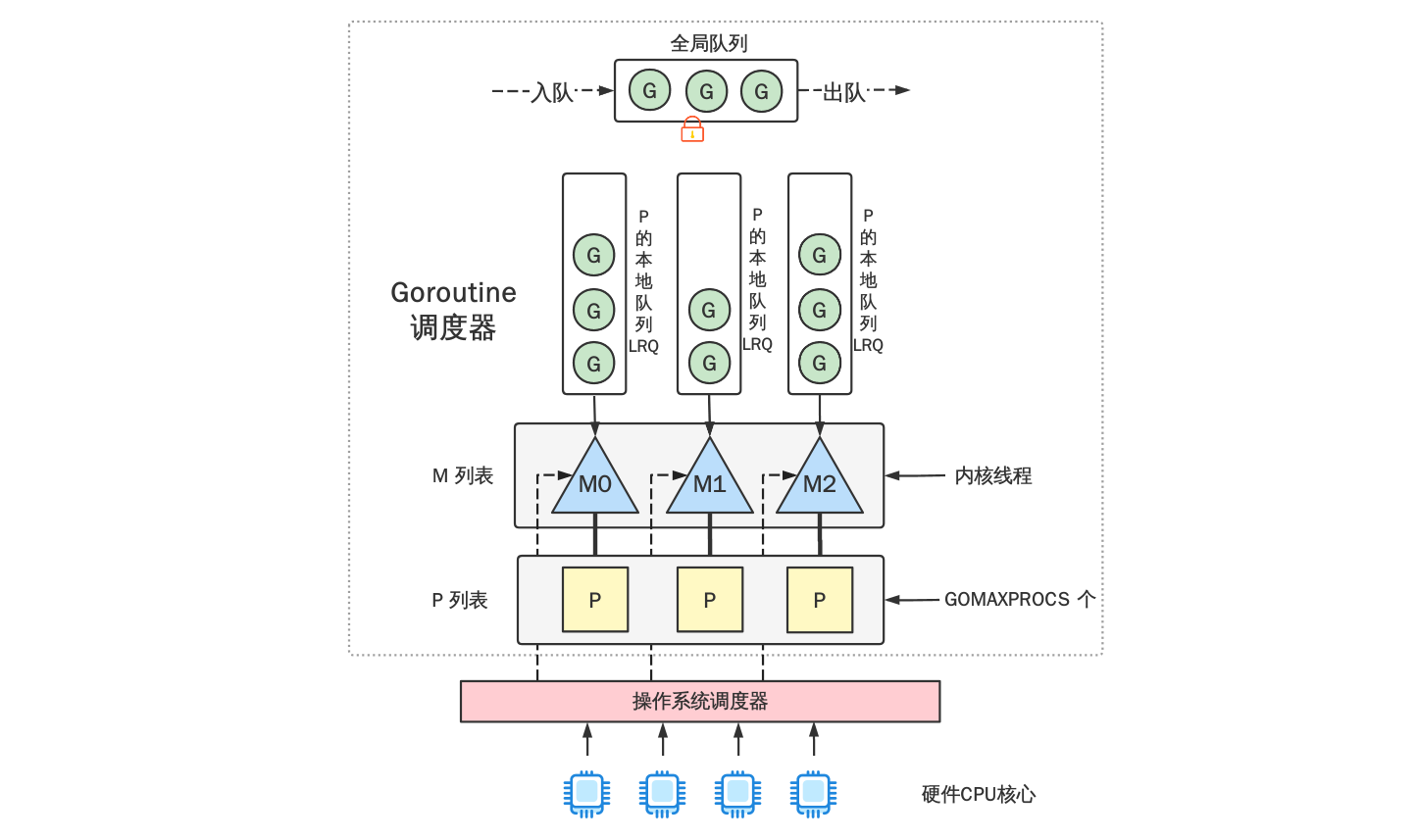
G 全称 Goroutine,P 全称 Processor,M 全称 Machine。
-
G:goroutine,即需要分担出去的任务;
-
P:一个装满 G 的队列,用于维护一些任务;
-
M: 一个操作器,用于将一个 G 搬到线程上执行;
-
G 是 Goroutine,装载着要执行的任务
-
P 是处理器,它的个数由
GOMAXPROCS决定,这个个数是真正能够并行的数量。 -
M 是内核态线程,想要运行任务就得获取 P;
- 获取途径:从 P-LRQ 中获取,若 P-LRQ 为空:
- 则从全局队列 拿 一批 G 放到自己的 P-LRQ
- 或从别的 P-LRQ 中 偷 一半到自己的 P-LRQ
- M 运行 G,G 执行完后,M 会从 P-LRQ 列获取下一个 G,一直重复;
- 当 M 阻塞时,Golang 会自动创建一个新的 M 并接手阻塞 M 的 P-LRQ
- 当 M 空闲时,有可能会回收或睡眠
- 获取途径:从 P-LRQ 中获取,若 P-LRQ 为空:
-
全局队列(Global Queue,GQ):存放等待运行的 G
-
P 的本地运行队列(P's Local Running Queue,LRQ):
- 存放 P 即将要运行的 G
- G 的数量 \(\le\) 256 个
- 队列中的 G 新创建的子 Goroutine —— G' 优先放在 LRQ(本地队列),如果 LRQ 满了,会把本地队列中一半的 G 放到全局队列。
- P 列表:
- P 的创建时机:程序启动时创建,并保存在数组中;在确定了 P 的最大数量 n 后,运行时系统会根据这个数量创建 n 个 P。
- P 的数量:最多有环境变量
$GOMAXPROCS个,可通过runtime.GOMAXPROCS(num)设置,但实际运行中受限于运行机器上的 CPU 有几个核心。
- M 列表:
- M 的创建时机:
- 原本的 M 阻塞了,就创建新的 M;
- P 中还有很多就绪任务,而没有空闲的 M 来执行,就创建新的 M。
- M 的数量:Golang 本身限定 M 的最大量是 10000,但一般用不到那么多,可通过
runtime/debug.SetMaxThreads()设置
- M 的创建时机:
调度策略¶
Golang 的调度器的设计策略大概有 4 点:复用线程、利用并行、抢占、全局 G 队列。
复用线程¶
关于复用线程,有两种机制:Work Stealing (偷取)机制 和 Hand Off (接手)机制。
-
Work Stealing 机制
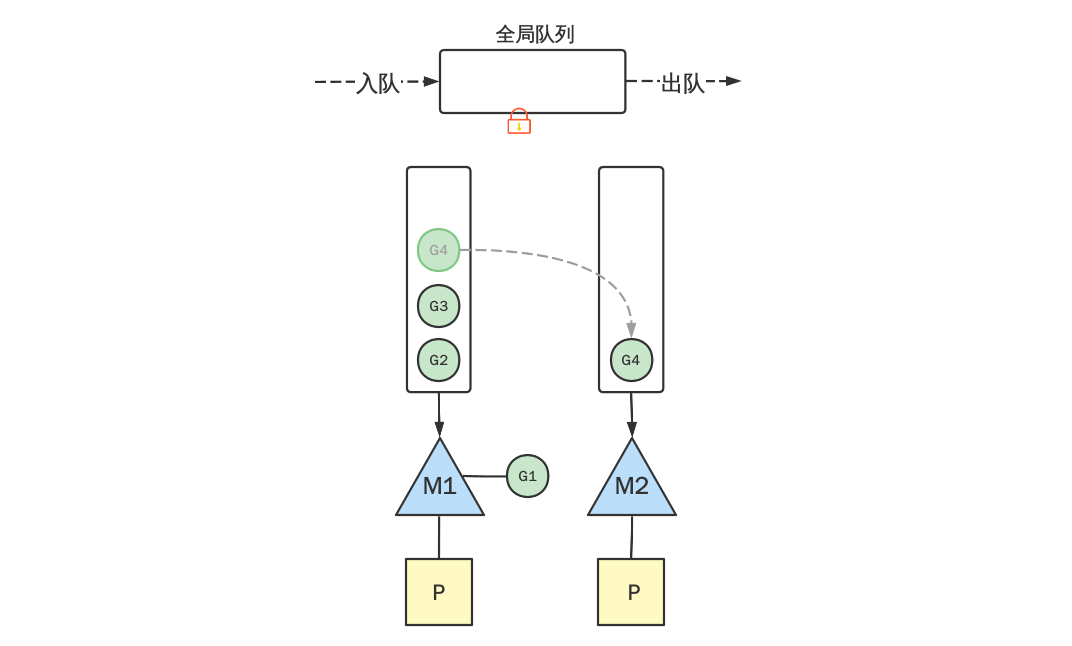
如上图,M1 的 P-LRQ 中有好几个 G 准备运行,而 M1 正在运行着 G1;另一边 M2 却没事干,想运行但没有 G,于是去 M1 的 P-LRQ 中从队尾偷走 G4 过来给自己执行。这就是偷取机制。
-
Hand Off 机制
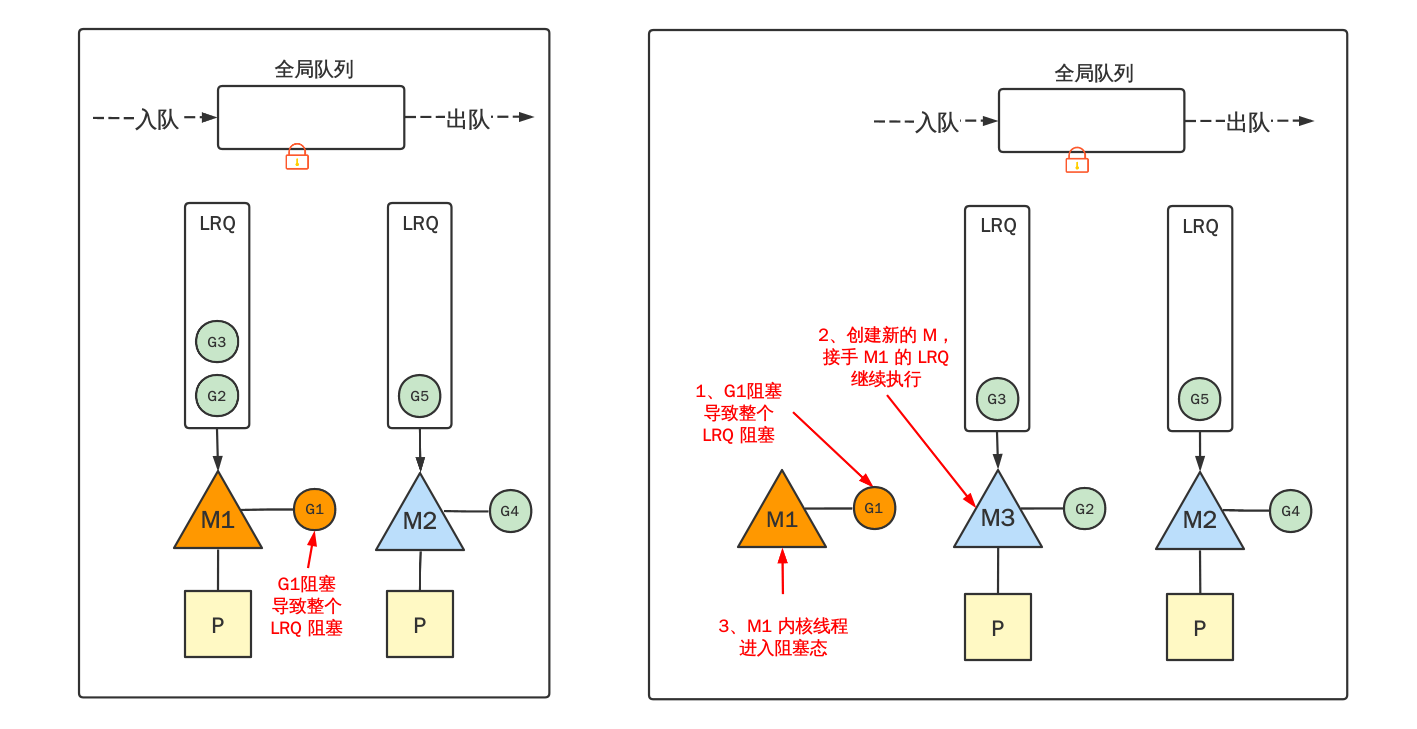
如上图左边,G1 执行了一个阻塞操作时,会导致 M1 进入阻塞态,后面的 G2、G3 都无法运行。此时 Golang 会向操作系统申请创建一个新的内核态进程 M3,然后把 M1 的 P-LRQ 接过来给 M3 去执行。这就是接手机制。
利用并行¶
GOMAXPROCS 设置 P 的数量,最有多 GOMAXPROCS 个线程分布在多个 CPU 上同时运行。默认的 GOMAXPROCS 等于运行机器上的核心数。
抢占¶
在 coroutine 中要等待一个协程主动让出 CPU 才执行下一个协程,属于协作式调度,如果占用着 CPU 的 coroutine 不让出,别的 coroutine 就不可能。
在早期的 Golang 中也是如此,但是在 go1.14 起引入了异步抢占机制,当一个 Goroutine 运行超过 10 ms,Go 会尝试抢占它的运行资源分配给别的 Goroutine。
全局 G 队列¶
当 M 从其他 P 中偷不到 G 时,可以从全局 G 队列中获取。
go func() 的执行过程¶
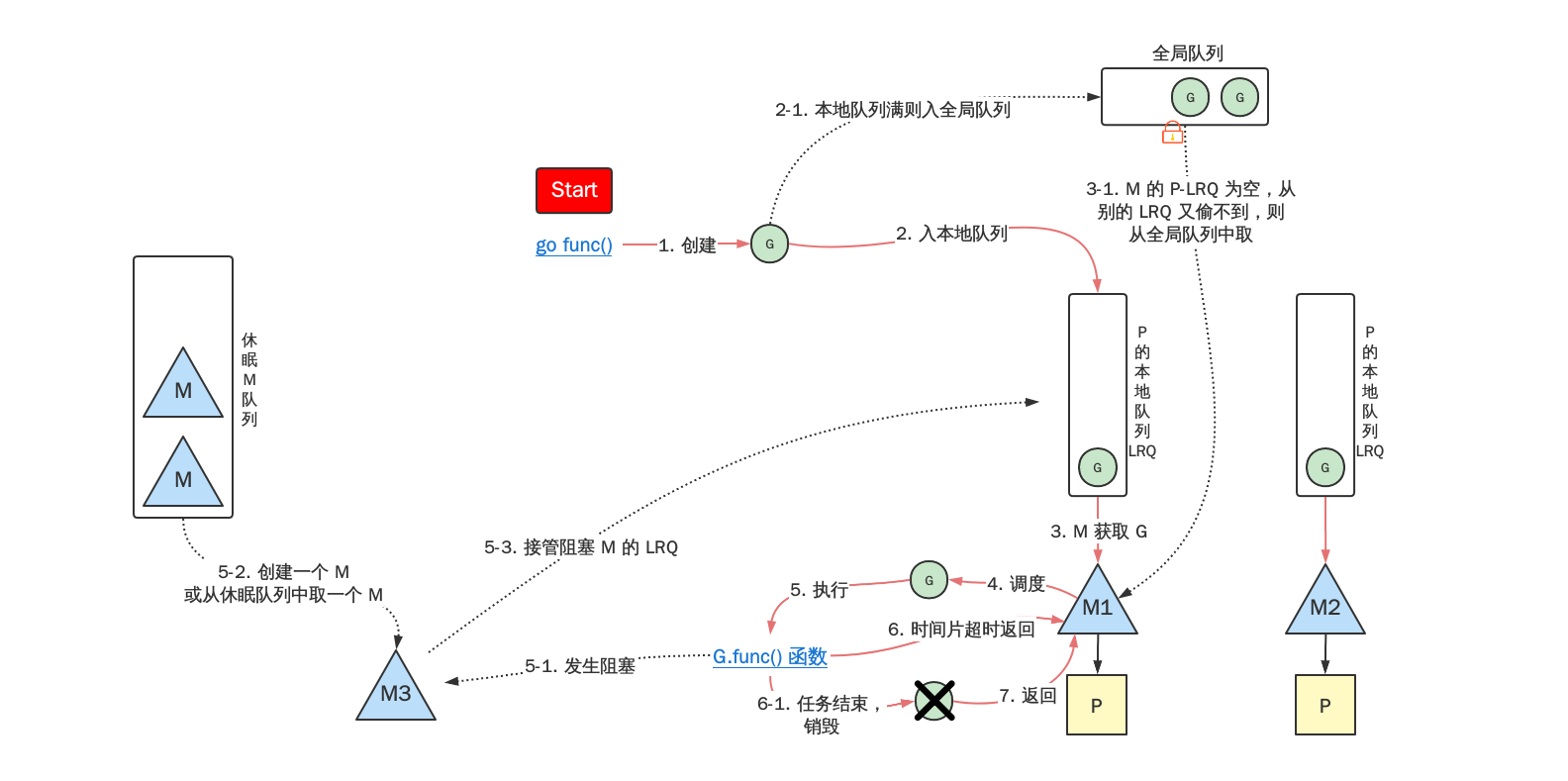
- 通过
go func()来创建一个 Goroutine; - 加入队列:
- 如果本地队列 P-LRQ 未满,则先加入 P-LRQ;
- 如果本地队列 P-LRQ 已满,则加入全局队列 GQ;
- M 处于 初始态,获取 G:
- 如果 M 对应的 P-LRQ 中有 G,则直接获取 G;
- 如果 M 对应的 P-LRQ 中没 G,则去偷别的 M 的 P-LRQ 中的 G(从队尾偷一半);
- 如果 M 对应的 P-LRQ 中没 G,别的 P-LRQ 也没 G,则从全局队列 GQ 中获取;
- M 转为 就绪态:获取到 G 之后绑定、初始化、各种资源就绪,准备执行;
- M 转为 执行态:获取到 CPU 调度,开始执行 G 中的
func()函数- M 在执行当前 G 时发生阻塞,该 M 转为 阻塞态,Go 会找新的 M 来接管原本的 P-LRQ,重复步骤 4;
- 新的 M 来源于:
- 从 M 池中寻找正在休眠的可用的 M;
- M 池中无可用 M 时创建新的 M。
- 阻塞的 M 获得条件后接触阻塞,G 返回原本的 P-LRQ 队尾,M 进入 M 池或销毁
- M 转为 初始态:
- 当 M 时间片结束时,会转为初始态,G 重入 LRQ 队尾,M 获取对头的 G,即步骤 3;
- 当 G 的任务结束,M 转为 初始态,即步骤 3;
「M0」和「G0」¶
-
M0:启动程序后编号为 0 的主线程,是进程中唯一的
- 在全局变量
runtime.m0中,不需要在 heap 上分配; - 负责执行初始化操作和启动第一个 G;
- 启动第一个 G 之后,M0 就和其他的 M 一样了。
- 在全局变量
-
G0:每次启动一个 M,都会第一个创建的 goroutine,就是 G0,是线程中唯一的
- 每个 M 都有自己的 G0;
- G0 仅用于负责调度其他的 G;
- G0 不 指向任何可 执行 的函数;
- 在调度或系统调用时,M 会切换到 G0 来调度,使用的是 G0 的栈空间 ;
- M0 的 G0 会放在全局空间;
Go 调度器执行过程¶
- Go 先根据
$GOMAXPROCS(默认为本机的逻辑CPU数)创建不同的P,并将它们存储在空闲P列表中。 新的 goroutine或goroutine 进入就绪态后,会唤醒一个 P 去分配资源,这个 P 会创建一个带有关联 OS 线程的 M。- 与 P 一样,M 空闲时(即 没有 goroutine 等待运行),会从系统调用返回,甚至被 GC 强制停止,转到空闲M列表中。
在示例中,打印 hello 的goroutine会使用主 goroutine,打印 world 的goroutine 会从 空闲列表中 获得 M 和 P。
runtime 创建 P -> P 创建 m0、g0 -> 关联 m0和 g0
CSP 模型¶
Communicating Sequential Process 通信顺序进程(简称CSP),是一种并发编程模型,是一个很强大的并发数据模型。于上个世纪七十年代提出,用于描述两个独立的并发实体通过共享的通讯 channel(管道)进行通信的并发模型。
相对于Actor模型,CSP中channel是第一类对象,它不关注发送消息的实体,而关注与发送消息时使用的channel。
严格来说,CSP 是一门形式语言(类似于 ℷ calculus),用于描述并发系统中的互动模式,也因此成为一众面向并发的编程语言的理论源头,并衍生出了 Occam/Limbo/Golang…
而具体到编程语言,如 Golang,其实只用到了 CSP 的很小一部分,即理论中的 Process/Channel(对应到语言中的 goroutine/channel):这两个并发原语之间没有从属关系, Process 可以订阅任意个 Channel,Channel 也并不关心是哪个 Process 在利用它进行通信;Process 围绕 Channel 进行读写,形成一套有序阻塞和可预测的并发模型。
Golang CSP¶
与主流语言通过共享内存来进行并发控制方式不同,Go 语言采用了 CSP 模式。这是一种用于描述两个独立的并发实体通过共享的通讯 Channel(管道)进行通信的并发模型。
Golang 就是借用CSP模型的一些概念为之实现并发进行理论支持,其实从实际上出发,go语言并没有,完全实现了CSP模型的所有理论,仅仅是借用了 process和channel这两个概念。
process是在go语言上的表现就是 goroutine 是实际并发执行的实体,每个实体之间是通过channel通讯来实现数据共享。
Go语言的CSP模型是由协程Goroutine与通道Channel实现:
-
Go协程 goroutine: 是一种轻量线程,它不是操作系统的线程,而是将一个操作系统线程分段使用,通过调度器实现协作式调度。是一种绿色线程,微线程,它与Coroutine协程也有区别,能够在发现堵塞后启动新的微线程。
-
通道channel: 类似Unix的Pipe,用于协程之间通讯和同步。协程之间虽然解耦,但是它们和Channel有着耦合。