8-图2
图的ADT
ADT 图 Graph
Data
顶点的有穷非空集合和边的集合
Operation
CreateGraph ( * G , V , E ) : 按照顶点集V和边集E的定义构造图G
DestoryGraph ( G * ) : 图G存在则销毁
LocateVex ( G * , v ) : 若图G中存在顶点v , 则返回v在图中的顶点数组的下标
GetVex ( G * , v ) : 返回图中顶点v的值
PutVex ( G * , v , value ) : 将图G中顶点v赋值value
FirstNeighbor ( G * , v ) : 返回顶点v的第一个邻接点 , 若无则返回空
NextNeighbor ( G * , v1 , v2 ) : 返回顶点v1相对于顶点v2的下一个邻接点 , 若v2是v1的最后一个邻接点则返回空
InsertVex ( G * , v ) : 在图G中增加顶点v
DeleteVex ( G * , v ) : 删除图G中顶点v及其相关的边 / 弧
InsertArc ( G * , v1 , v2 ) : 在图G中增加弧 < v1 , v2 > , 若G是无向图 , 还需添加对称弧 < v2 , v1 >
DeleteArc ( G * , v1 , v2 ) : 在图G中删除弧 < v1 , v2 > , 若G是无向图 , 还需删除对称弧 < v2 , v1 >
DFSTraverse ( G * ) : 对图G中进行深度优先遍历
BFSTraverse ( G * ) : 对图G中进行广度优先遍历
Adjacent ( G * , v1 , v2 ) : 判断图G中是否存在边 / 弧 < v1 , v2 >
Neighbors ( G * , v ) : 列出图G中与顶点v邻接的边
GetEdgeValue ( G * , v1 , v2 ) : 获取图G中边 / 弧 < v1 , v2 > 对应的权值
SetEdgeValue ( G * , v1 , v2 , value ) : 设置图G中边 / 弧 < v1 , v2 > 对应的权值为value
endADT
图的存储结构
图的顶点之间没有次序关系,且顶点的邻接情况多变,无法用统一的格式来存储。
图的存储结构总共有以下 5 种方式:
邻接矩阵
邻接表
十字链表
邻接多重表
边集数组
邻接矩阵 Adjacent Matrix
Note
图的邻接矩阵的存储方式是用两个数组来表示图。
一个一维数组用来存储图中的顶点集,一个二维数组(称为邻接矩阵)用来存储图中的边集。
图的邻接矩阵表示法 = 一维数组 \(\times\) 1 + 二维数组 \(\times\) 1
设 图G 有 n 个顶点,则邻接矩阵是一个 \(n \times n\) 的方阵,定义为:
\[
Arc[i][j] =
\begin{cases}
1, & {(v_i, v_j) \in E 或 \langle v_i, v_j \rangle \in E} \\\\
0, & {反之}
\end{cases}
\]
无向图
理论描述
顶点集 很容易表示,使用顶点结构类型的一维数组来存储顶点信息。
边集 可以用 矩阵(Metrix) 来表示,而矩阵在计算机中可以使用二维数组来实现。
eg:
\[
\begin{bmatrix}
0 & 1 & 1 & 0 \\\\
1 & 0 & 1 & 0 \\\\
1 & 1 & 0 & 1 \\\\
0 & 0 & 1 & 0
\end{bmatrix}
\]
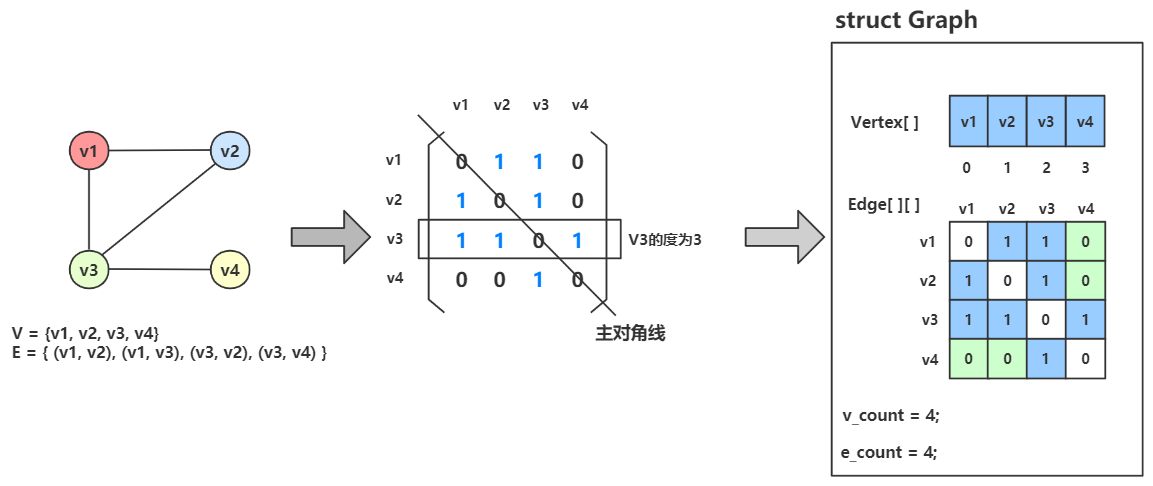
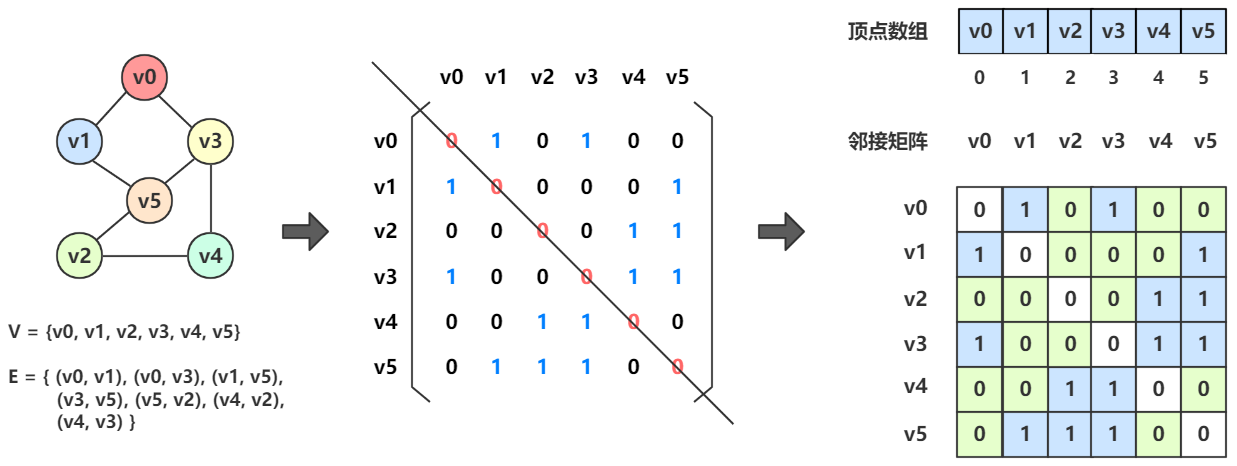
所以对于图 \(G =(V, {E})\) ,可以使用一个一维数组来存储顶点集 \(V\) ,再用一个二维数组来存储边集 \(E\) 。
于是一张图可以变成下图所示:
上图中,有一个结构体 struct Graph,结构体中包含一个一维数组 Vertex[] 和一个二维数组 Edge[][],一个 v_count 存储顶点数,一个 e_count 存储边数。
Vertex[] 用来存储顶点信息,Edge[][] 用来存储边的信息。
例如 \((v_1, v_2)\) 就将 Edge[0][1] 置为1;而 \((v_1, v_2)\) 也可以表示为 \((v_2, v_1)\) ,所以 Edge[1][0] 也应置为1。
而简单图不会有自己邻接自己的边,所以 Edge[0][0]、Edge[1][1]、Edge[2][2]、Edge[3][3] 均为0。
稍微观察可以发现,无向图的邻接矩阵一定是一个对称矩阵
某个顶点的度,起始就是这个顶点 vi 在邻接矩阵中第 i 行(或第 i 列)的元素之和。
eg:顶点 \(v_3\) 的度就是 1+1+0+1 = 3
求顶点 vi 的所有邻接点就是在邻接矩阵中第 i 行所有元素为 1 的点。
eg:顶点 \(v_2\) 的所有邻接点就遍历 Edge[1][...],其中为 Eege[1][0]、Edge[1][2] 为1,表示 \(v_1\) 和 \(v_3\) 为邻接点。
代码实现
GraphModel.h MatrixGraph.h MatrixGraph.c main.c
// GraphModel.h
#ifndef GRAPH_MODEL_H_INCLUDED
#define GRAPH_MODEL_H_INCLUDED
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#define MAX 4
typedef enum {
ERROR ,
OK ,
} Status ;
typedef enum {
DG , // 有向图
UDG , // 无向图
DN , // 有向网
UDN , // 无向网
} GraphKind ;
typedef char * Vertex ; // 顶点数组类型
typedef int Edge ; // 邻接矩阵类型
#endif // GRAPH_MODEL_H_INCLUDED
// MatrixGraph.h
#ifndef MATRIX_GRAPH_H_INCLUDED
#define MATRIX_GRAPH_H_INCLUDED
#include "GraphModel.h"
typedef struct {
Vertex vers [ MAX ]; // 顶点数组
Edge edges [ MAX ][ MAX ]; // 邻接矩阵(边数组)
size_t v_count ; // 顶点总数
size_t e_count ; // 边总数
GraphKind kind ; // 图类型
} MatrixGraph ;
/**
* @description: 创建无向图
* @param G 要操作初始化的图
* @return 成功返回OK,失败返回ERROR
*/
Status CreatUDG ( MatrixGraph * G );
/**
* @description: 返回某个顶点在顶点集合中的下标
* @param G 要查找的图结构
* @param v 顶点
* @return 返回下标,不存在返回-1
*/
int LocateVex ( MatrixGraph * G , Vertex v );
#endif // MATRIX_GRAPH_H_INCLUDED
// MatrixGraph.c
#include "MatrixGraph.h"
Status CreatUDG ( MatrixGraph * G )
{
G -> kind = UDG ;
printf ( "Please type the count of Vertex : " );
scanf ( "%d" , & G -> v_count );
printf ( "Please type the count of Edge : " );
scanf ( "%d" , & G -> e_count );
// 录入顶点数组
printf ( "Please type Vertex in turn. \n " );
for ( int i = 0 ; i < G -> v_count ; i ++ ) {
G -> vers [ i ] = calloc ( 10 , sizeof ( Vertex ));
printf ( "Vertex %d :" , i );
scanf ( "%s" , G -> vers [ i ]);
}
// 初始化邻接矩阵,所有边的权值设置为0
for ( int i = 0 ; i < G -> v_count ; i ++ ) {
for ( int j = 0 ; j < G -> v_count ; j ++ ) {
G -> edges [ i ][ j ] = 0 ;
}
}
// 录入邻接矩阵
printf ( "Please type Vertex and Adjacent. \n " );
for ( int i = 0 ; i < G -> e_count ; i ++ ) {
Vertex v1 = calloc ( 10 , sizeof ( Vertex ));
Vertex v2 = calloc ( 10 , sizeof ( Vertex ));
printf ( "Vertex %d : " , i + 1 );
scanf ( "%s" , v1 );
printf ( "Adjacent %d : " , i + 1 );
scanf ( "%s" , v2 );
/** 核心代码 begin */
// 获取顶点的下标
int x = LocateVex ( G , v1 );
int y = LocateVex ( G , v2 );
if ( x == -1 || y == -1 )
return ERROR ;
// 对应位置置为1
G -> edges [ x ][ y ] = 1 ;
G -> edges [ y ][ x ] = 1 ;
/** 核心代码 end */
free ( v1 );
free ( v2 );
}
return OK ;
}
int LocateVex ( MatrixGraph * G , Vertex v )
{
int index = 0 ;
while ( index < G -> v_count ) {
if ( strcmp ( v , G -> vers [ index ]) == 0 ) {
break ;
}
index ++ ;
}
return index == G -> v_count ? -1 : index ;
}
void Test ()
{
MatrixGraph G ;
Status status = CreatUDG ( & G );
if ( status = ERROR ) {
printf ( "Create Graph Failed~" );
return ;
}
printf ( "The Adjacent Matrix: \n " );
printf ( " \t " );
for ( int i = 0 ; i < G . v_count ; i ++ ) {
printf ( " \t %s" , G . vers [ i ]);
}
printf ( " \n " );
for ( int i = 0 ; i < G . e_count ; i ++ ) {
printf ( " \t %s" , G . vers [ i ]);
for ( int j = 0 ; j < G . e_count ; j ++ ) {
printf ( " \t %d" , G . edges [ i ][ j ]);
}
printf ( " \n " );
}
}
#include "MatrixGraph.c"
int main ( int argc , char const * argv [])
{
Test ();
return 0 ;
}
有向图
理论描述
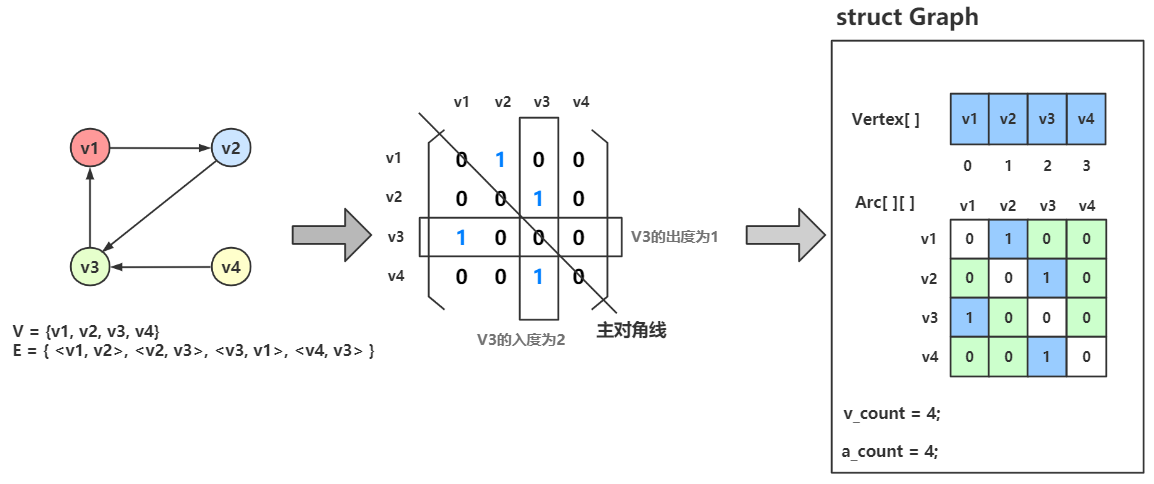
有向图和无向图的区别在于邻接矩阵。
在有向图邻接矩阵中,
第 \(i\) 行含义:以结点 \(v_i\) 为尾的弧(即出度边)
第 \(i\) 列含义:以结点 \(v_i\) 为头的弧(即入度边)
其特点为:
无向图的邻接矩阵一定是对称的,当有向图的邻接矩阵不一定是对称的。
顶点 \(v_i\) 的出度 = 第 \(i\) 行 元素之和
顶点 \(v_i\) 的入度 = 第 \(i\) 列 元素之和
顶点 \(v_i\) 的度 = 第 \(i\) 行元素之和 + 第 \(i\) 列元素之和
Note
口诀:
Arc[行][列]Arc[出][入]列头入,行尾出 :即 列为弧头、入度;行为弧尾、出度。
代码实现
在代码实现上,有向图与无向图唯一的区别在于:录入弧的数据之后,只需要执行赋值一次就可以。
G -> edges [ x ][ y ] = 1 ;
// G->edges[y][x] = 1;
这里我将有向图和无向图的创建合并在一起,在调用函数时多传入一个 GraphKind 类型参数来区分。
Status CreatGraph ( MatrixGraph * G , GraphKind kind )
{
G -> kind = kind ;
// 录入顶点数和边数
...
// 录入顶点数组
...
// 初始化邻接矩阵,所有边的权值设置为0
...
// 录入邻接矩阵
printf ( "Please type %s and %s. \n " , kind == UDG ? "Vertex" : "InDegree" , kind == UDG ? "Adjacent" : "OutDegree" );
for ( int i = 0 ; i < G -> e_count ; i ++ ) {
Vertex v1 = calloc ( 10 , sizeof ( Vertex ));
Vertex v2 = calloc ( 10 , sizeof ( Vertex ));
printf ( "%s %d : " , kind == UDG ? "Vertex" : "OutDegree" , i + 1 );
scanf ( "%s" , v1 );
printf ( "%s %d : " , kind == UDG ? "Adjacent" : "InDegree" , i + 1 );
scanf ( "%s" , v2 );
int x = LocateVex ( G , v1 );
int y = LocateVex ( G , v2 );
if ( x == -1 || y == -1 )
return ERROR ;
G -> edges [ x ][ y ] = 1 ;
G -> edges [ y ][ x ] = kind == UDG ? 1 : 0 ; // 无向图置为1,有向图保持默认
free ( v1 );
free ( v2 );
}
return OK ;
}
// Status status = CreatGraph(&G);
Status status = CreatGraph ( & G , DG );
同时,有向图的顶点的度 = 出度 + 入度,可以实现一个函数根据图的类型来返回顶点的度。
/**
* @description: 获取某个顶点的度
* @param G 要查找的图
* @param v 要查询度的顶点
* @return 该顶点的度
*/
size_t GetDegree ( MatrixGraph * G , Vertex v )
{
// 获取无向图的度:累加第i行或第i列的元素之和
// 获取有向图的度:累加第i行和第i列的元素之和并相加
int index = LocateVex ( G , v );
int inDegree = 0 ;
int outDegree = 0 ;
for ( int i = 0 ; i < G -> e_count ; i ++ ) {
inDegree += G -> edges [ i ][ index ];
outDegree += G -> edges [ index ][ i ];
}
return G -> kind == UDG ? inDegree : inDegree + outDegree ;
}
无向图的度只需要返回行的和或列的和就行,有向图的度则需要相加再返回。
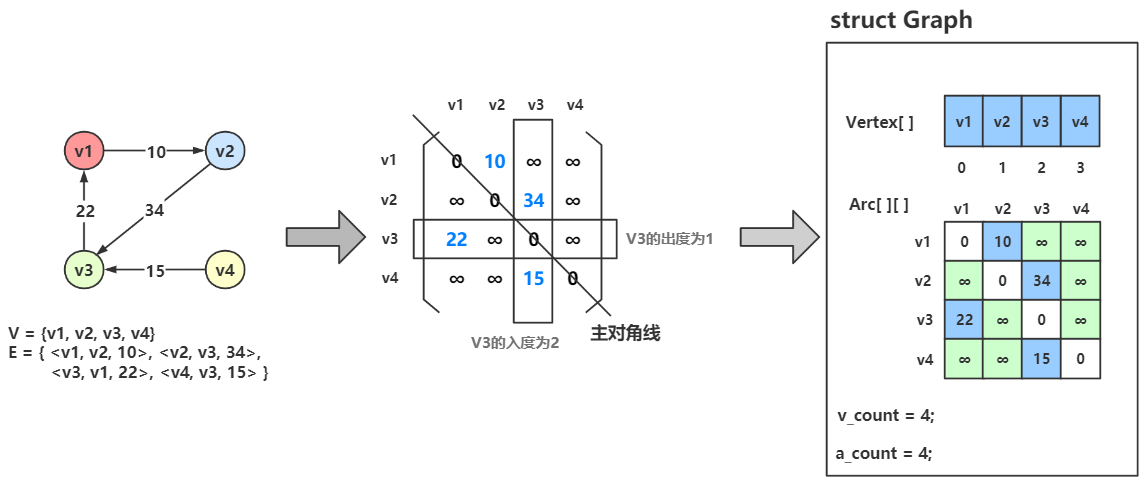
网
边或弧带权的图即为网。
理论描述
设 图G 有 n 个顶点,则邻接矩阵是一个 \(n \times n\) 的方阵,定义为:
\[
Arc[i][j] =
\begin{cases}
W_{ij}, & {(v_i, v_j) \in E 或 \langle v_i, v_j \rangle \in E} \\\\
0, & {i=j} \\\\
∞, & {反之}
\end{cases}
\]
这里 \(W_{ij}\) 表示 \(\langle v_i, v_j \rangle\) 或 \((v_i, v_j)\) 上的权值。
\(\infty\) 表示一个计算机允许的、大于所有边上权值的值,即一个不可能的极限值,在C语言中可以使用 INT_MAX 来表示无穷。
代码实现
网的大部分代码与有向图和无向图的相同的,只有几处需要修改。
// 初始化邻接矩阵,所有边的权值设置为无穷
for ( int i = 0 ; i < G -> v_count ; i ++ ) {
for ( int j = 0 ; j < G -> v_count ; j ++ ) {
G -> edges [ i ][ j ] = INT_MAX ;
}
}
INT_MAX。
// 录入邻接矩阵
printf ( "Please type %s and %s. \n " , kind == UDN ? "Vertex" : "InDegree" , kind == UDN ? "Adjacent" : "OutDegree" );
for ( int i = 0 ; i < G -> e_count ; i ++ ) {
Vertex v1 = calloc ( 10 , sizeof ( Vertex ));
Vertex v2 = calloc ( 10 , sizeof ( Vertex ));
int weight = 0 ; // 权值
printf ( "%s %d : " , kind == UDN ? "Vertex" : "OutDegree" , i + 1 );
scanf ( "%s" , v1 );
printf ( "%s %d : " , kind == UDN ? "Adjacent" : "InDegree" , i + 1 );
scanf ( "%s" , v2 );
printf ( "Value %d: " , i + 1 );
scanf ( "%s" , & weight );
int x = LocateVex ( G , v1 );
int y = LocateVex ( G , v2 );
if ( x == -1 || y == -1 )
return ERROR ;
G -> edges [ x ][ y ] = weight ;
G -> edges [ y ][ x ] = kind == UDN ? weight : INT_MAX ;
free ( v1 );
free ( v2 );
}
// 邻接矩阵
for ( int i = 0 ; i < G . e_count ; i ++ ) {
printf ( " \t %s" , G . vers [ i ]);
for ( int j = 0 ; j < G . e_count ; j ++ ) {
printf ( " \t %s" , G . edges [ i ][ j ] == INT_MAX ? "∞" : ( char * ) G . edges [ i ][ j ]);
}
printf ( " \n " );
}
邻接表 Adjacent List
邻接矩阵适合处理稠密图,对于稀疏图,邻接矩阵会造成巨大的浪费。在数据结构中,解决浪费问题需要往链式结构的方向去想。
Note
图的邻接表的存储方式是用一维数组和单链表来表示图。
一个一维数组用来存储图中的顶点集,多个单链表用来存储图中的边集。
图的邻接矩阵表示法 = 一维数组 \(\times\) 1 + 单链表 \(\times\) n
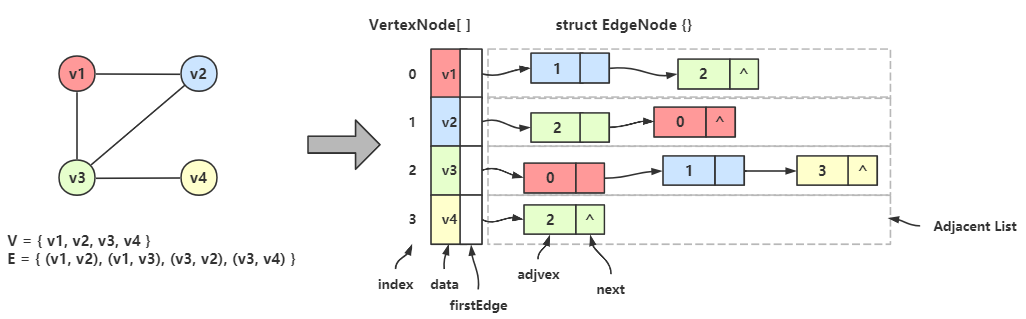
无向图的邻接表
邻接表的处理方法如下:
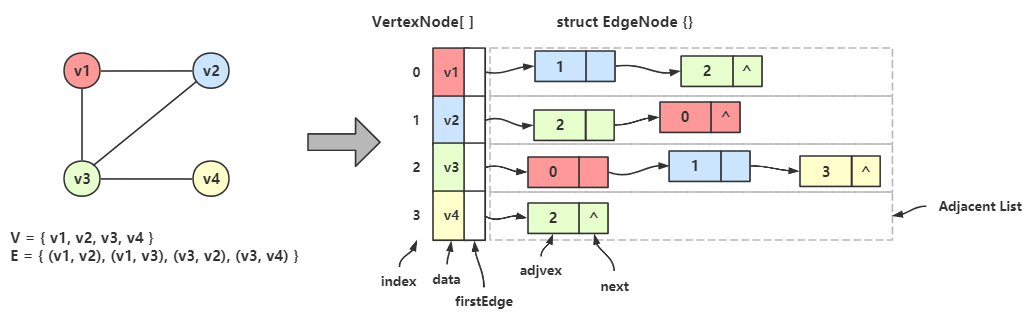
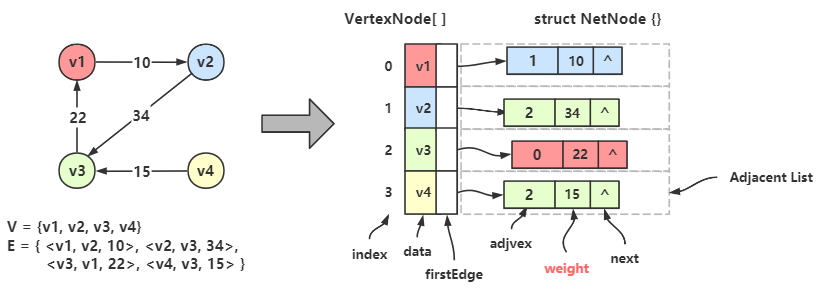
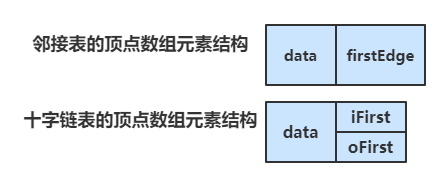
图的顶点集用一维数组存储,数组元素为 数据域(data) + 首邻接点域(firstEdge);
图的边/弧集用单链表存储,链表结点由 邻接点域(adjvex) + 指针域(next) 构成;
首邻接点域 指的是顶点的第一个边链表结点的地址,链表中的 邻接点域 存储的是邻接点的在顶点数组中的下标。
从上图可以看出,一个无向图可以用一个顶点类型的一维数组来存储顶点,每个顶点都各自有一条边链表,存储着该顶点的所有邻接点;
顶点数组中的某个顶点 Vertex[i] 和 对应边链表中的任一个结点构成了一条边。
eg:\(v_1\) 的邻接点是 \(v_2\) 和 \(v_3\) ,在顶点数组中 \(v_1\) 的下标是 0;
在 Vertex[0] 数据域(data) 中存着 \(v_1\) ,首邻接点域(firstEdge) 存储着边链的第一个结点的地址;
在边链的第一个结点中,邻接点域(adjvex) 存储着 \(v_2\) 的下标 1,然后指针域(next) 指向下一个结点;
下一个结点的邻接点域存储着 \(v_3\) 的下标 2,后面不再有了,所以指针域为空。
仔细观察可以发现以下特点:
无向图的邻接表重复存储着数据(邻接矩阵里也是),但总比邻接矩阵节省空间。
边链中的结点,除了与顶点数组中的元素,相互之间没有关系。
顶点的度 = 它的边链的结点数
求顶点的所有邻接点 = 遍历顶点的边链并取邻接点域
如果有 n 条边,则边链表会有 2n 个结点
有向图的邻接表
有向图的邻接表是类似的,但有向图区分方向。
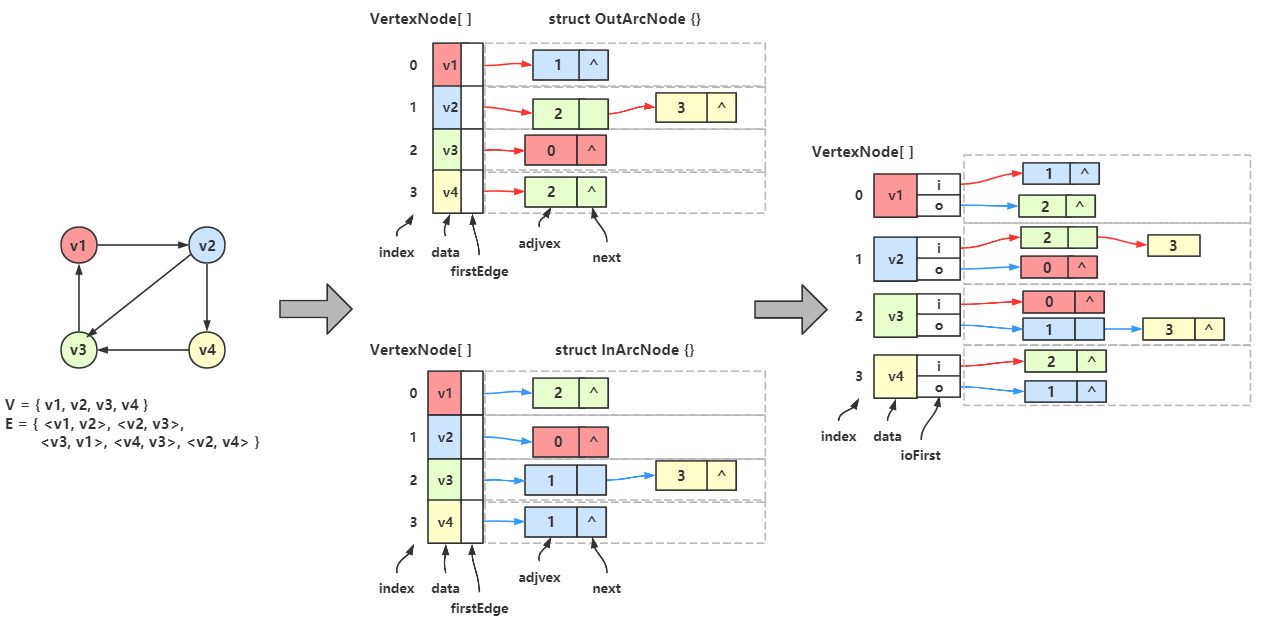
我们以顶点为弧尾来存储边链表,并称这样的边链表为 出边表 ,或 正邻接表
我们以顶点为弧头来存储边链表,并称这样的边链表为 入边表 ,或 逆邻接表
右上出边表 和 右下入边表
出边表中,顶点 \(v_1\) 作为弧尾,邻接弧头 \(v_2\) ,所以首邻接点与指向出边表的第一个结点,结点中的数据域存储着弧头 \(v_2\) 的下标 1。所以 \(v_1\) 和 Vertex[1] 共同组成一条弧。
而顶点 \(v_2\) 有 2 个出度,所以 \(v_2\) 的出边表中有 2 个结点。
入边表中,顶点 \(v_3\) 作为弧头,邻接弧尾 \(v_2\) 和 \(v_4\) ,所以首邻接点指向入边表的第一个结点,结点中存着 \(v_2\) 的下标 1,第二个结点存着 \(v_4\) 下标 3。
观察两个表,可以发现以下特点:
使用入边表表示图时,顶点的入度 = 对应入边表的结点数量,要计算出度只能遍历所有边链表
使用出边表表示图时,顶点的出度 = 对应出边表的结点数量,要计算入度只能遍历所有边链表
边链表中的结点,除了与顶点元素,相互之间没有关系
弧的总数 = 所有边链表的结点的总数之和
有向网的邻接表
有向网和无向网的邻接表仅仅只是在边链表中的结点增加一个变量 weight 来存储权值。同样有有向无向、出边入边之分。
代码实现
// 边链表结点类型
typedef struct node {
int adjvex ; // 邻接点域、邻接点下标
struct node * next ; // 指针域
} EdgeNode , ArcNode ;
// 顶点类型
typedef char * Vertex ;
// 顶点结点类型
typedef struct {
Vertex data ; // 数据域
EdgeNode firstEdge ; // 首邻接点域
} VertexNode ;
// 图类型
typedef struct {
VertexNode vexs [ MAX ]; // 顶点结点数组
int v_count ; // 顶点数量
int e_count ; // 边/弧数量
GraphKind kind ; // 图类型
} AdjListGraph ;
十字链表 Orthogonal List
Note
十字链表主要针对有向图,适用于需要 频繁获取顶点的入度和出度,频繁地判断一个点是不是另一个点 的邻接点等的情况。
其核心思想是**将出边表和入边表整合起来**。
有向图的邻接表只有表示出度的出边表,或者表示入度的入边表,鱼和熊掌不可兼得。
对于这种情况,小孩子才做选择,大人全都要!
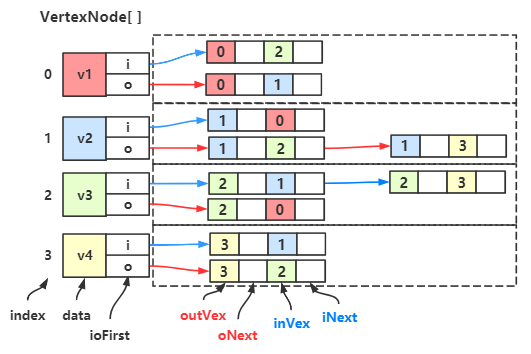
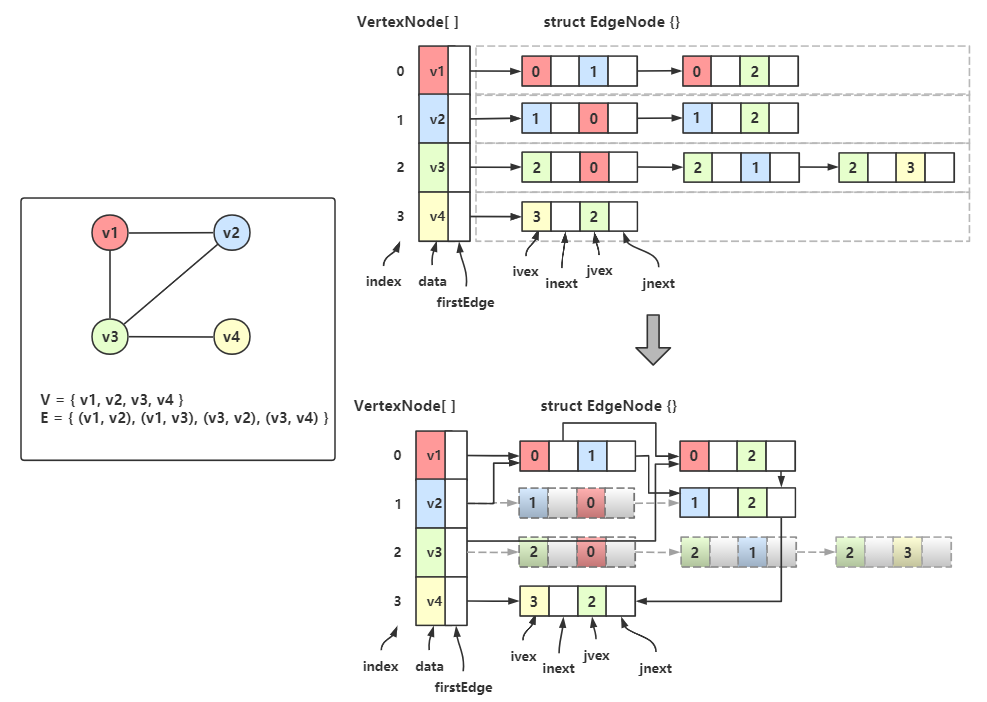
于是我们可以改造一下顶点数组,让一个顶点数组的元素包含 顶点、出边表的首邻接点域、入边表的首邻接点域
data 表示顶点,iFirst 表示入边表的首邻接点域,oFirst 表示出边表的首邻接点域。
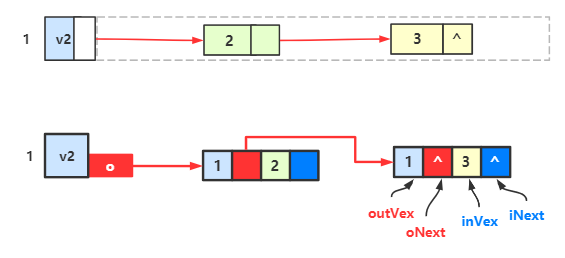
于是我们可以得到一个这样的双邻接表:
←图结构,↑出边表,↓入边表,→双邻接表
最左边是图结构,中间上面是出边表,中间下面是入边表,将它们结合,就成了最右边的双邻接表
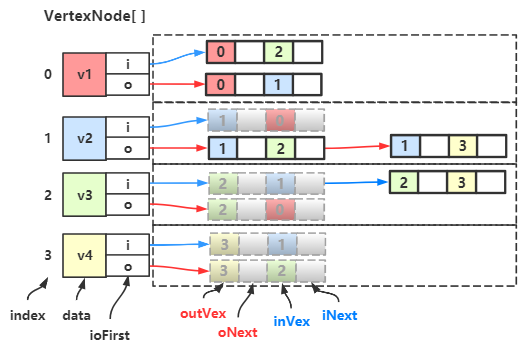
下一步我们改造一下边链表的结点,让它由 弧尾下标 + 弧尾边链的指针域 + 弧头下标 + 弧头边链的指针域 构成。
oVex 表示弧中出边的结点,即弧尾结点,的下标;oNext 替代了原出边表结点里的指针域;
iVex 表示弧中入边的结点,即弧头结点,的下标;iNext 替代了原入边表结点里的指针域;
现在对双邻接表进行改造:
然后我们会发现有很多重复的结点,我们保留一个,删除一个:
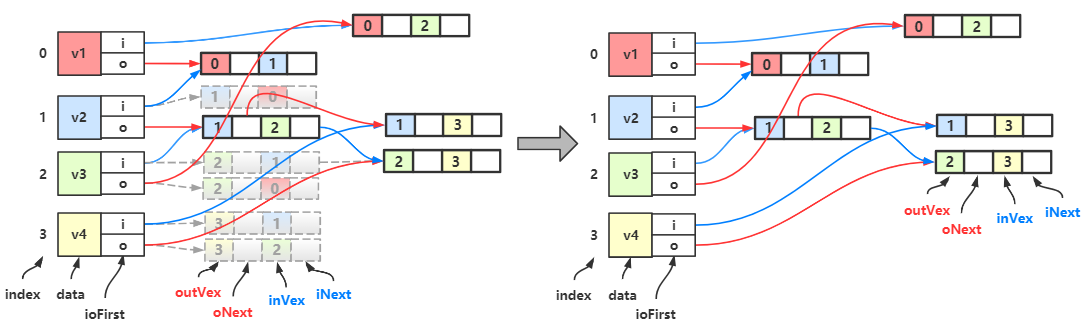
接着把被删除的地方的链指向保留下来的那个结点:
例如 \(v_1\) 的出边表第一个结点(\(v_1\) 红色线条指向的那个 0 和 1 的结点) 和 \(v_2\) 的入边表的第一个节点(\(v_2\) 蓝色线条指向的那个 0 和 1 的结点),
这两个结点相同,
于是我删掉其中 \(v_2\) 的那个,然后让 \(v_2\) 的蓝色线指向 \(v_1\) 的第一个结点,其他结点也是同样操作。
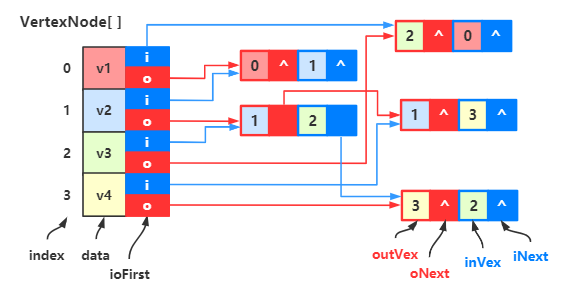
最后整理一下就是下图的样子:
对比一下该图的顶点 \(v_2\) 的出边表和十字链表:
可以看到没有损失任何信息。
代码实现
/** 顶点类型 */
typedef char * Vertex ;
/** 十字链表结点 */
typedef struct node {
Vertex oVex ; // 弧头下标
Vertex iVex ; // 弧尾下标
struct node * oNext ; // 出边表指针域
struct node * iNext ; // 入边表指针域
int weight ; // 权值
} OrthoNode ;
/** 顶点数组元素类型 */
typedef struct {
Vertex data ; // 顶点
OrthoNode iFirst ; // 入边表的首个结点
OrthoNode oFirst ; // 出边表的首个节点
} VertexNode ;
/** 图结构 */
typedef struct {
VertexNode vexArray [ MAX ]; // 顶点数组
int v_count ; // 顶点数量
int a_count ; // 弧的数量
GraphKind kind ; // 图的类型(有向图/有向网)
} OrthoGraph ;
总结
Note
十字链表5步走:
生成有向图的出边表和入边表
组合成双邻接表
改造链表结点
删除重复结点
连接
邻接多重表 Adjacent Multilist List
从图中可以发现边链结点很多都是重复的。当删除一条边时,需要到两条边链中删除。
例如删除 边(\(v_1\) , \(v_3\) ),需要找到 \(v_1\) 的边链,删除第二个结点,然后还要找到 \(v_3\) 的边链,然后删除第一个结点。显然这是比较繁琐的。
所以邻接多重表就在邻接表的基础上对边链的结点进行改造。
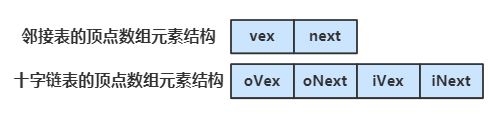
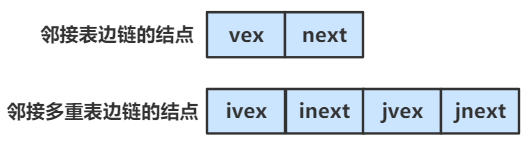
邻接表的结点由 邻接点的下标 + 下一结点指针 构成。
邻接多重表的结点由 顶点下标 + 顶点的下一结点的指针 + 邻接点下标 + 邻接点的下一结点的指针 构成。
其思想是 将所有顶点的边链整合起来 ,即节省空间,也提高了操作效率。
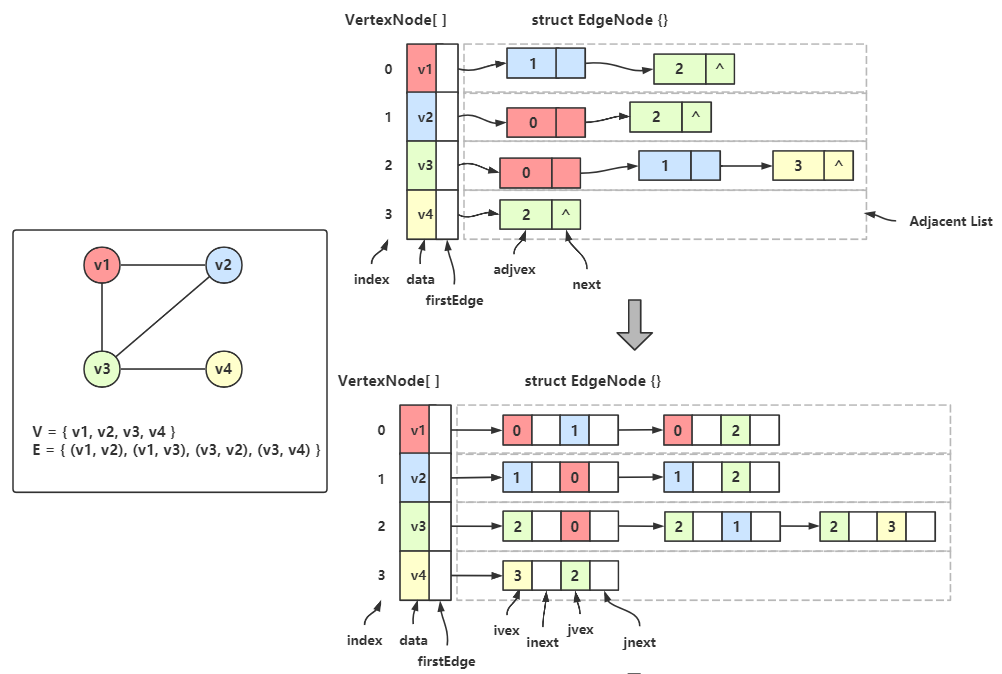
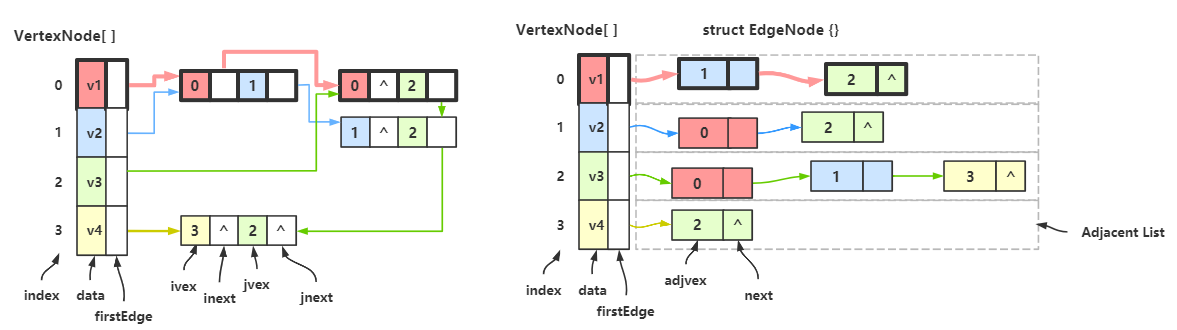
下面介绍一下如何将邻接表改为邻接多重表:
Step 1 Step 2 Step 3
首先将 边链的结点进行改造:边链结点中不仅要填入邻接点的下标,还要填入顶点自己的下标。
例如 顶点 \(v_1\) 有两个邻接点 \(v_2\) 和 \(v_3\) ,所以要在两个结点中的 ivex 处填入 \(v_1\) 的下标 0。其他结点同理。看不懂可以对比两个图的边链。
例如 \(v_1\) 的第一个边链结点中有 0 和 1,代表 \(v_1\) 的地址和 \(v_2\) 的地址;\(v_2\) 的第一个边链结点也有 1 和 0,所以随便保留哪一个都可以。
图中将 \(v_2\) 的第一个边链结点删除,然后让 \(v_1\) 的第一个边链结点也成为 \(v_2\) 的边链结点。
这一步怎么删,删完指向谁可能有点乱,请看下面的图。
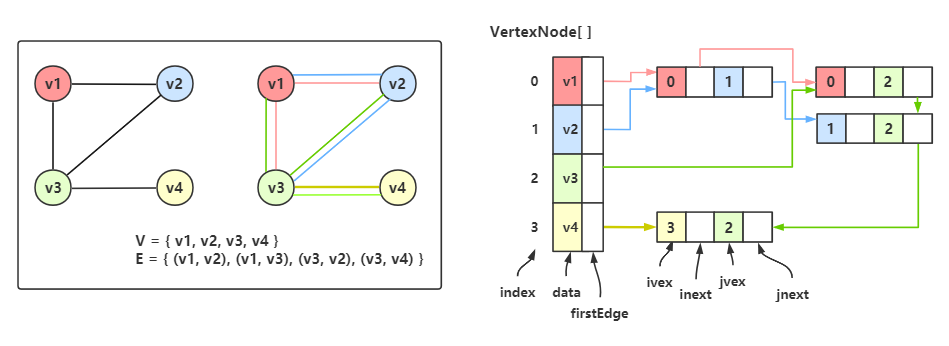
这里左侧两个图结构是同一个,第二个图结构多做了4条辅助线用来对照,实际真正的图是第一个的图结构,不要混淆。
对照第二个的图结构,和右侧的邻接多重表:
顶点 \(v_1\) 有两条边,邻接 \(v_2\) 和 \(v_3\) ,在邻接多重表中用红色线连接起来了。单独观察 VertexNode[0] 和 红色线连接的两个结点,是不是跟邻接表相似?
同样道理可以继续观察 \(v_2\) 、\(v_3\) 、\(v_4\) 。
我们会发现邻接多重表的结点数少了,而且 结点总数刚好就是边数 。
现在再来体会那句:将所有边链整合起来 ,再体会体会为什么要增加 inext 和 jnext 两个元素在结点中,其实就是为了保留原本的信息。
邻接多重表中边链的结点不分是谁的,只记录边两头两个顶点的下标。
Tip
扩展一下,如果无向网使用邻接多重表表示,是不是只要将边链结点多加一个 权值 的成员即可?如果还要再来个是否被搜索过的标记,是不是再加个 布尔值 的成员即可?
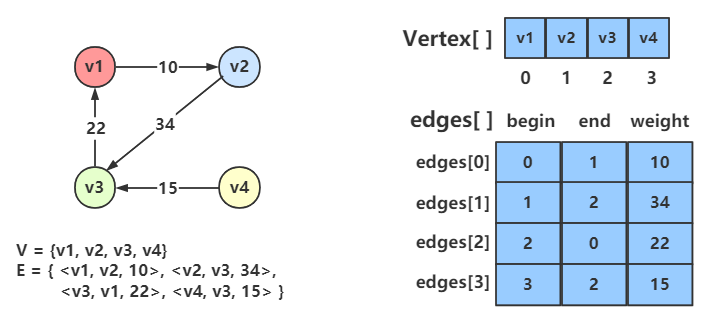
边集数组 Edgeset Array
Note
边集数组是由两个一维数组构成,一个是存储顶点的信息,另一个是存储边的信息。这个边数组的每个元素由一条边的起点下标 (begin) 、终点下标 (end) 和权 (weight) 组成。
边集数组关注的是边的集合。
在边集数组中要查找一个顶点的度需要扫描整个边数组,效率不高,因此更适合对边依次进行处理的操作,而不适合对顶点相关的操作。
适用情况总结
邻接矩阵适合处理稠密图
邻接表适合处理稀疏图
十字链表适合于需要频繁获取顶点的入度和出度,频繁地判断一个点是不是另一个点的邻接点等的情况
邻接多重表主要是针对无向图
边集数组适合对边依次进行处理的操作,而不适合对顶点相关的操作
图的遍历
深度优先搜索 DFS
深度优先遍历 (Depth-First-Search) 是仿树的前序遍历,该算法是利用栈来实现,也就是递归,所以在 DFS 中会有 递归 和 回溯 的说法。
DFS 需要借助一个数组来记录访问状态,这里将其称作 状态数组(Status Array) ;该数组长度为顶点总数,次序与顶点数组相同。
从某一个顶点 \(v_i\) 出发,则当前顶点为 \(v_i\) ;
先将该顶点标记为已访问,然后遍历其所有邻接点,找到 第一个未访问的邻接点 \(v_j\) 并置为当前顶点;
接着从该顶点 \(v_j\) 出发,先标记为已访问,然后遍历找到 第一个未访问的邻接点 vk 并置为当前顶点... 以此类推
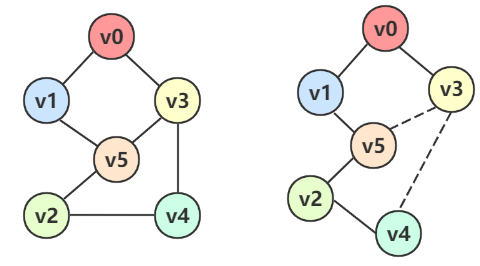
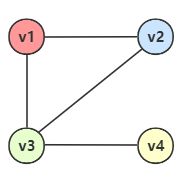
例如上图左边是一个图,我们可以转换一下思维,像右图一样把那两条边当作没有,就可以看成一棵二叉树
运用树的前序遍历法可以得到:** \(v_0\) -> \(v_1\) -> \(v_5\) -> \(v_2\) -> \(v_4\) -> \(v_3\) **,而这正好就是 DFS 的结果。
回过头来重新看着左边的图,假设从 v0 出发(其实图是无序的,从任何一点出发都可以);
\(v_0\) 有两个邻接点 \(v_1\) 和 \(v_3\) ,我们先选择 \(v_1\) ,然后从 \(v_1\) 出发;\(v_1\) 有两个邻接点 \(v_5\) 和 \(v_0\) ,\(v_0\) 已经访问过了,只能选择 \(v_5\) ,然后从 \(v_5\) 出发;\(v_5\) 有三个邻接点 \(v_1\) 、\(v_2\) 、\(v_3\) ,\(v_1\) 已经访问过了,我们先选择 \(v_2\) ,然后从 \(v_2\) 出发;\(v_2\) 有两个邻接点 \(v_5\) 和 \(v_4\) ,\(v_5\) 已经访问过了,只能选择 \(v_4\) ,然后从 \(v_4\) 出发;\(v_4\) 有两个邻接点 \(v_2\) 和 \(v_3\) ,\(v_2\) 已经访问过了,只能选择 \(v_3\) ,然后从 \(v_3\) 出发;\(v_3\) 有三个邻接点 \(v_4\) 、\(v_5\) 、\(v_0\) ,全都访问过了,到此遍历也就结束了。
如果仔细阅读上面6个步骤会发现,当我们遍历时,我们需要知道这个顶点是不是被访问过了,所以我们需要一个状态数组来记录;
而当有多个邻接点可以访问时,我们选择的依据,其实是顶点在顶点数组中存储的顺序所决定的。
例如在 \(v_5\) 的时候,选择了 \(v_2\) 而不是 \(v_3\) ,其实是我们默认顶点数组是按照 v0、$v_1$、$v_2$、$v_3$、$v_4$、$v_5$ 的顺序存储,假设是按照 v0、$v_1$、$v_3$、$v_2$、$v_4$、$v_5$ 存储,\(v_3\) 在 \(v_2\) 前,则会先访问 \(v_3\) 。
邻接矩阵的 DFS
先将图的边用矩阵表示,在计算机中使用二维数组存储。
然后设置一个状态数组,长度和顶点数组相同。
接下来就可以执行 DFS 了。
第一步:先初始化状态数组为未访问状态,即最开始所有顶点都未访问。
第二步:遍历顶点数组,让数组里每个顶点都放入遍历执行函数中,不过在调用遍历执行函数之前要先判断顶点是否已被访问。
int visited [ MAX ];
/** DFS begin */
/**
* @description: 深度优先遍历算法
* @param G 需要被遍历的图
* @return 无
*/
void DFSTraverse_AMG ( MatrixGraph * G )
{
// 初始化状态数组
for ( int i = 0 ; i < G -> v_count ; i ++ )
visited [ i ] = UNVISITED ;
// DFS 遍历
for ( int i = 0 ; i < G -> v_count ; i ++ )
if ( ! visited [ i ]) // 如果某个顶点未访问
DFS_AMG ( G , i ); // 调用遍历执行函数
}
遍历执行函数就是 DFS 的核心算法了。
该函数接收顶点的下标,并做3件事:
访问当前顶点
更改顶点的访问状态
获取第一个未访问的邻接点下标,然后递归进去,找不到则回溯
/**
* @description: 深度优先搜索的核心算法
* @param G 要搜索的图
* @param index 要搜索的顶点的下标
* @return 无
*/
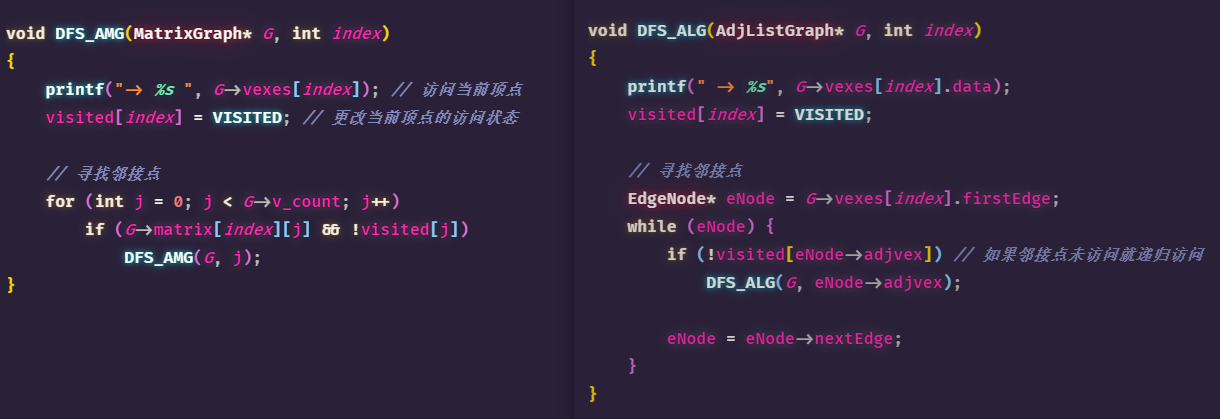
void DFS_AMG ( MatrixGraph * G , int index )
{
printf ( "-> %s " , G -> vexes [ index ]); // 访问当前顶点
visited [ index ] = VISITED ; // 更改当前顶点的访问状态
for ( int j = 0 ; j < G -> v_count ; j ++ )
if ( G -> matrix [ index ][ j ] && ! visited [ j ]) // 获取第一个未访问的邻接点下标然后递归进去
DFS_AMG ( G , j );
}
/** DFS end */
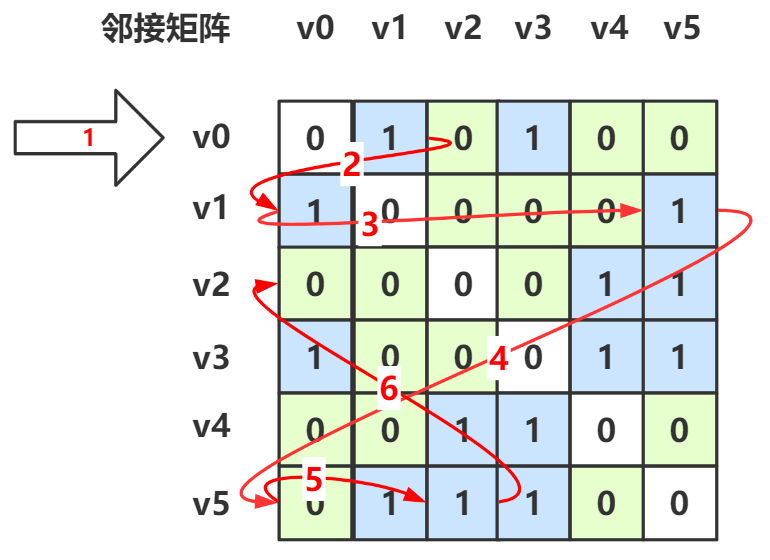
在邻接矩阵中,获取某个顶点的所有邻接点就是遍历其所在的行,找到第一个未访问的邻接点。
从邻接矩阵中看如上图
最开始从第 0 行进行(箭头1),找到第一个邻接点的下标,其列标为 1,于是跳到第 1 行(箭头2)
第 1 行第一个邻接点是 v0 ,已经访问过,所以跳过(箭头3),一直找到 \(v_5\) 这个邻接点,其列标为 5,于是跳到第 5 行(箭头4)
第 5 行第一个邻接点的 \(v_1\) ,已经访问过,所以跳过(箭头5),接下去找到第二个邻接点 \(v_2\) ,其列标为 2,于是跳到第 2 行(箭头6)
接下去的步骤都是这个思路,画出来太乱就没画了。
邻接表的 DFS
邻接表的具体代码实现跟邻接矩阵稍稍不同而已,只不过把数组处理换成了链表处理
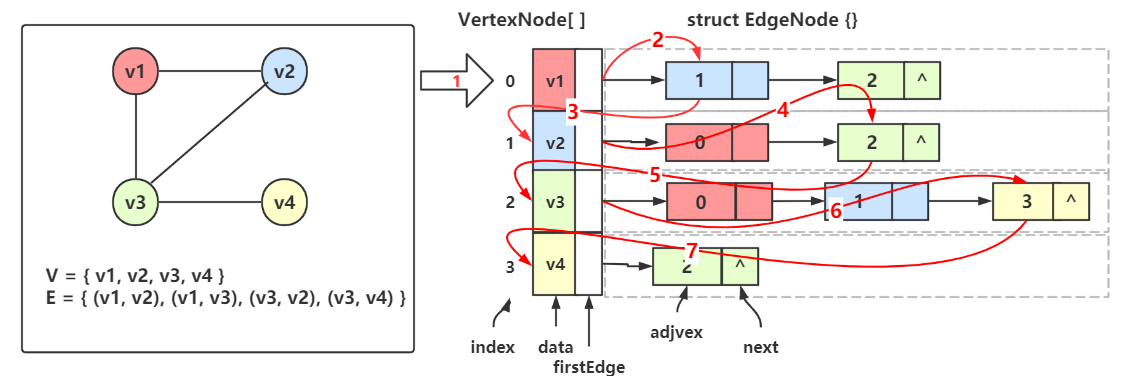
最开始从 \(v_1\) 开始(箭头1),访问 \(v_1\) 的边链上第一个结点(箭头2),得到了 \(v_2\) 的下标,于是跳到 \(v_2\) (箭头3)
接着从 \(v_2\) 开始,先访问 \(v_2\) ,然后遍历 \(v_2\) 的边链上的结点(箭头4),第一个结点 0 是 \(v_1\) 的下标,已经访问过了,于是继续下一个结点,得到了 \(v_3\) 的下标,于是跳到 \(v_3\) (箭头5)
接着从 \(v_3\) 开始,先访问 \(v_3\) ,然后遍历 \(v_3\) 的边链上的结点(箭头6),第一和第二个结点是 \(v_1\) 和 \(v_2\) 的下标,已经访问过,所以接着下一个结点,得到 \(v_4\) 的下标,于是跳到 \(v_4\) (箭头7)
接着从 \(v_4\) 开始,先访问 \(v_4\) ,然后遍历 \(v_4\) 的边链上的结点,发现得到的是 \(v_3\) 的下标,已经访问过了,再下去没有了,于是结束。
void DFSTraverse_ALG ( AdjListGraph * G )
{
// 初始化状态数组
for ( int i = 0 ; i < G -> v_count ; i ++ )
visited [ i ] = UNVISITED ;
// DFS遍历
for ( int i = 0 ; i < G -> v_count ; i ++ )
if ( ! visited [ i ]) // 如果顶点没有被访问,就递归调用
DFS_ALG ( G , i );
}
void DFS_ALG ( AdjListGraph * G , int index )
{
printf ( " -> %s" , G -> vexes [ index ]. data ); // 访问顶点
visited [ index ] = VISITED ; // 更改状态
// 寻找邻接点
EdgeNode * eNode = G -> vexes [ index ]. firstEdge ;
while ( eNode ) {
if ( ! visited [ eNode -> adjvex ]) // 如果邻接点未访问就递归访问
DFS_ALG ( G , eNode -> adjvex );
eNode = eNode -> nextEdge ;
}
}
DFSTraverse_ALG() 和 DFSTraverse_AMG() 是一样的,初始化状态数组,然后遍历顶点数组,调用 DFS 算法
DFS_AMG() 中是遍历某一行,DFS_ALG() 中是遍历某一条链表,执行的逻辑都是如果邻接点为访问就递归。
时间复杂度
在遍历图时,对图中每个顶点至多调用一次 DFS 函数,因为一旦某个顶点被标志成已访问后,就不再从它出发进行搜索。
因此,深度遍历图的过程实质上是对每个顶点查找其邻接点的过程,其耗费时间取决于所采用的存储结构。
当用邻接矩阵时,使用的是二位数组,查找每个顶点的邻接点所需时间为 \(O(n^2)\) ,n 为图中顶点数。
当用邻接表时,使用的是链表,查找每个顶点的邻接点所需时间为 \(O(e)\) ,e 为无向图中边的数量,或有向图中弧的数量。
由此,
邻接矩阵的 DFS 时间复杂度为 \(O(n^2 + n) = O(n^2)\)
邻接表的 DFS 时间复杂度为 \(O(n+e)\)
广度优先 BFS
广度优先遍历 (Breadth-First-Search) 是仿树的层次遍历。该算法是利用队列实现的。
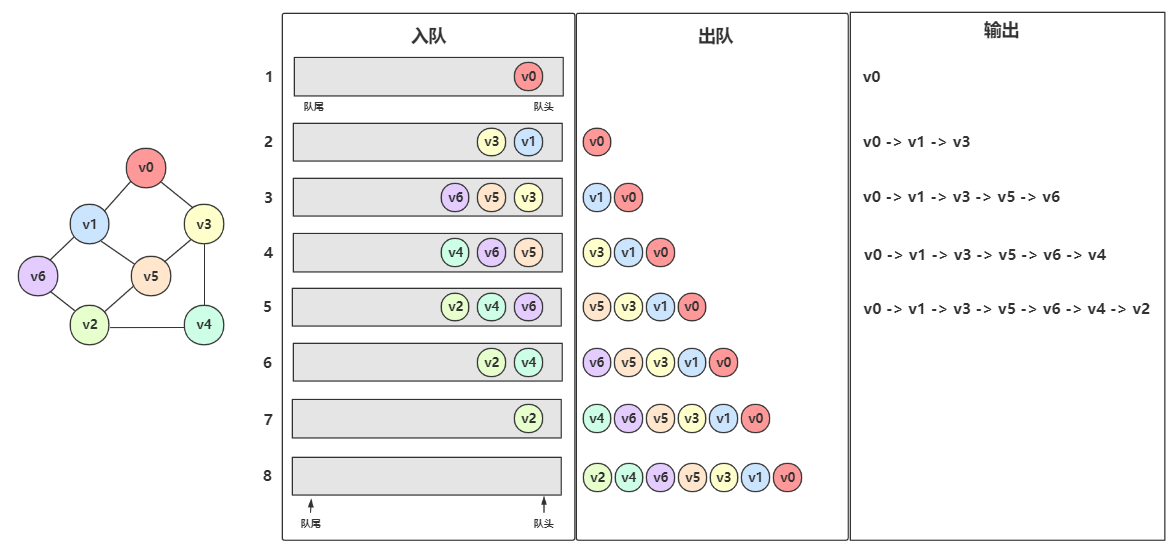
BFS 的思想是,把顶点都放到队列中,当访问一个顶点,即为出队一个元素;当出队一个元素时,需将其所有未访问的邻接点入队。
先从 \(v_0\) 开始遍历,打印 \(v_0\) ,然后 \(v_0\) 入队
队列不为空,\(v_0\) 出队,同时 \(v_0\) 的未入队且未访问的邻接点 \(v_1\) 、\(v_3\) 入队,然后访问 \(v_1\) 、\(v_3\)
队列不为空,\(v_1\) 出队,同时 \(v_1\) 的未入队且未访问的邻接点 \(v_5\) 、\(v_6\) 入队,然后访问 \(v_5\) 、\(v_6\)
队列不为空,\(v_3\) 出队,同时 \(v_3\) 的未入队且未访问的邻接点 \(v_4\) 入队,然后访问 \(v_4\)
队列不为空,\(v_5\) 出队,同时 \(v_5\) 的未入队且未访问的邻接点 \(v_2\) 入队,然后访问 \(v_2\)
队列不为空,\(v_6\) 出队,同时 \(v_6\) 已经没有未入队且为访问的邻接点了,不做入队操作
队列不为空,\(v_4\) 出队
队列不为空,\(v_2\) 出队
队列为空,结束
到此 BFS 执行完毕
所以该图的 BFS 顺序为 \(v_0\) -> \(v_1\) -> \(v_3\) -> \(v_5\) -> \(v_6\) -> \(v_4\) -> \(v_2\) 。
队列
BFS 需要借助队列实现,下面是队列的代码:
邻接矩阵的 BFS
/** BFS begin */
void BFSTraverse_AMG ( MatrixGraph * G )
{
for ( int i = 0 ; i < G -> v_count ; i ++ )
visited [ i ] = UNVISITED ;
// 循环遍历每个顶点
for ( int i = 0 ; i < G -> v_count ; i ++ )
if ( ! visited [ i ]) // 如果没有访问过就遍历访问
BFS_AMG ( G , i );
}
void BFS_AMG ( MatrixGraph * G , int index )
{
printf ( "-> %s " , G -> vexes [ index ]); // 访问顶点
visited [ index ] = VISITED ; // 更改访问状态
LinkQueue queue ;
InitLinkedQueue ( & queue ); // 初始化队列
EnQueue ( & queue , G -> vexes [ index ]); // 当前顶点入队,对应上图中第一步的 v0 入队
while ( ! isEmptyQueue ( & queue )) { // 取出队头元素,遍历队头顶点的所有邻接点
Vertex vex ;
DeQueue ( & queue , & vex ); // 取出的队头顶点
// 获取该顶点的所有邻接点
for ( int i = FirstAdjVex_AMG ( G , vex ); i ; i = SecondAdjVex_AMG ( G , vex , G -> vexes [ i ])) {
if ( ! visited [ i ]) {
printf ( "-> %s " , G -> vexes [ i ]); // 遇到顶点的邻接点先访问
visited [ i ] = VISITED ;
EnQueue ( & queue , G -> vexes [ i ]); // 再入队
}
}
}
}
int FirstAdjVex_AMG ( MatrixGraph * G , Vertex v )
{
int defaultWeight = G -> kind <= 1 ? 0 : INT_MAX ; // 图/网 的默认权重
int vex_index = LocateVex ( G , v ); // 获取顶点下标
if ( vex_index == -1 )
return ERROR ;
// 搜索图的邻接矩阵中域顶点v的第一个邻接点下标
for ( int j = 0 ; j < G -> v_count ; j ++ )
if ( G -> matrix [ vex_index ][ j ] != defaultWeight )
return j ;
return 0 ;
}
int SecondAdjVex_AMG ( MatrixGraph * G , Vertex v1 , Vertex v2 )
{
int defaultWeight = G -> kind <= 1 ? 0 : INT_MAX ; // 图/网 的默认权重
int index1 = LocateVex ( G , v1 );
int index2 = LocateVex ( G , v2 );
if ( index1 == -1 || index2 == -1 )
return 0 ;
for ( int i = index2 + 1 ; i < G -> v_count ; i ++ )
if ( G -> matrix [ index1 ][ i ] != defaultWeight )
return i ;
return 0 ;
}
/** BFS end */
邻接表的 BFS
按理来说邻接矩阵的 BFS 和邻接表的 BFS 应该是一样的,至少在无向图中是一样的。
但是如果邻接表是用的头插法,那可能结果是不一样的
void BFSTraverse_ALG ( AdjListGraph * G )
{
for ( int i = 0 ; i < G -> v_count ; i ++ ) // 初始化状态数组
visited [ i ] = UNVISITED ;
for ( int i = 0 ; i < G -> v_count ; i ++ ) // 遍历顶点数组,逐一对每一个未访问的顶点执行 BFS
if ( ! visited [ i ])
BFS_ALG ( G , i );
}
void BFS_ALG ( AdjListGraph * G , int index )
{
printf ( "-> %s " , G -> vexes [ index ]. data ); // 访问顶点
visited [ index ] = VISITED ; // 更改顶点状态
LinkQueue queue ;
InitLinkedQueue ( & queue );
EnQueue ( & queue , G -> vexes [ index ]. data ); // 当前顶点入队
while ( ! isEmptyQueue ( & queue )) { // 取出队头元素,遍历队头顶点的所有邻接点
Vertex vex ;
DeQueue ( & queue , & vex ); // 取出队头元素
// 遍历所有邻接点
EdgeNode * node = G -> vexes [ LocateVex_ADJ ( G , vex )]. firstEdge ;
while ( node ) {
if ( ! visited [ node -> adjvex ]) {
printf ( "-> %s " , G -> vexes [ node -> adjvex ]. data ); // 邻接点先访问
visited [ node -> adjvex ] = VISITED ;
EnQueue ( & queue , G -> vexes [ node -> adjvex ]. data ); // 再入队
}
node = node -> nextEdge ;
}
}
}
时间复杂度
在遍历图时,每个顶点最多进一次队列,遍历图的过程实质上是通过边或弧找邻接点的过程。
因此,广度优先搜索、深度优先搜索,在遍历图时的时间复杂度是相同的。
总结
存储结构:
邻接矩阵 :一维数组存储顶点集+二维数组存储边/弧邻接表 :一维数组存储顶点集+单链表存储边/弧
出边表 :链表的结点存储的是弧头的下标入边表 :链表的结点存储的是弧尾的下标
十字链表 :将出边表和入边表整合起来,主要针对有向图邻接多重表 :将所有边链的结点整合起来,去除重复的结点,主要针对无向图边集数组 :一维数组存储顶点集+一维数组存储边集,关注的是边
图的遍历:
深度优先搜索 DFS 和 广度优先搜索 BFS 是图的最基本的遍历方式。DFS 是仿树的前序遍历,利用栈做辅助,具体实现是不断将当前顶点的第一个未访问邻接点拿去递归。
BFS 是仿树的层序遍历,利用队列做辅助,具体实现是每当出队一个元素时,就访问其所有未访问且未入队的邻接点,并将这些邻接点入队。
使用邻接矩阵存储和使用邻接表存储的图在做 DFS 或 BFS 时没什么区别,只不过邻接矩阵是操作二维数组,邻接表是操作链表。
 { loading=lazy }
这个图的边集可以变成下面的矩阵:
{ loading=lazy }
这个图的边集可以变成下面的矩阵: