图的应用: 最小生成树、最短路径、拓扑排序、关键路径
9-图3¶
图在现实中有着许多的应用,帮助人们解决了许多问题,同时图的应用也是比较晦涩难懂的地方。
本文图的应用共有: - 最小生成树 - 最短路径法 - 拓扑排序 - 关键路径
从图结构的角度看,图的应用有两种:一种的解决无向图的,一种是解决有向图的。 更详细的看: - 最小生成树使用的是贪心算法,得到的是局部最优解,有可能得到的不是全局最优解 - 最短路径法使用的是动态规划,得到的是全局最优解 - 拓扑排序关注的是点 - 关键路径关注的是边
接下来每讲一个应用之前我会先举一个场景,这样学习的时候才不至于不知道用来干嘛的。
最小生成树 Minimum Spanning Tree¶
应用场景¶
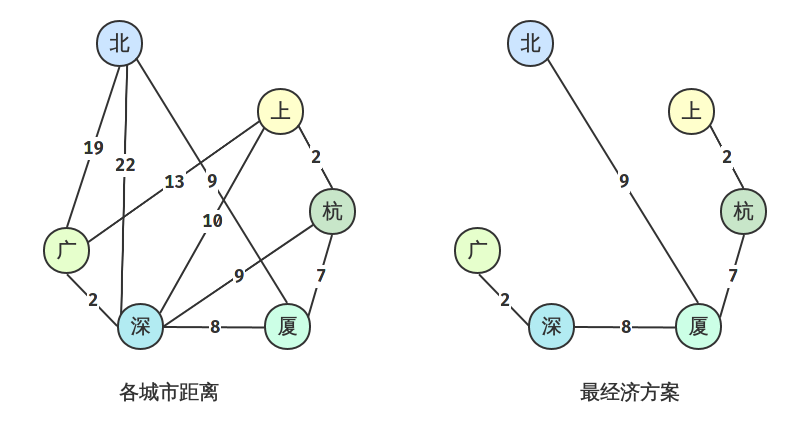
假设现在有 北、上、广、深、杭、厦 几个城市,他们之间要建立通信联络网。 一共有 6 个城市,他们之间最少只需要 6 - 1 = 5 条通信线路即可连通。 但是各个城市之间的距离是不同的,距离越远,建立费用越高(即距离和费用成正比)。 所以,问题就是:怎么样让这 6 个城市建立起通信联络网,并且建立费用最低?
答案是使用最小生成树。
理解¶
要理解最小生成树,可以从**最小**和**树**去理解。
先理解「树」: 首先,生成树是一颗树,那么一堆顶点要生成一棵树,就不能有环 其次,每个顶点都不能落下,所以这些顶点得组成一个连通图

接着理解「最小」: 一张网,也就是路径上带权值的图,可以有很多生成树,而最小生成树则是:所有生成树里路径权值总和最小的一颗生成树。
普里姆算法 (Prim)¶
从任一顶点出发,将其加入已选顶点数组、其邻接的边加入备选边数组; 选取该顶点权值最小的一条边,所连接的顶点也加入已选顶点数组,并将该边
克鲁斯卡尔算法 (Kruskal)¶
克鲁斯卡尔算法适合求 稀疏网 的最小生成树。
克鲁斯卡尔算法的做法是将每一条边和权值存储到数组中,然后 1. 进行一次从小到大的排序。 2. 从最小的边开始,将边放置到顶点上。放置前判断是否产生环: 1. 是:跳过这条边 2. 否:放置这条边 3. 重复步骤 1
总共放置顶点总数 - 1 次即可。
先将每条边和其权值存储到数组里,做一个从小到大的排序 遍历数组,判断是否产生环 是:删除该边 否:将边放入图中,进入下一轮 循环次数:顶点总数 - 1
最短路径¶
最短路径和最小生成树都是求几个顶点之间的最短的路径,区别在于:
- 最小生成树的思想是使用贪心算法,而贪心算法能获得的是局部最优解,不一定是全局最优解
- 最短路径的思想则是使用动态规划,而动态规划能获得的是全局最优解